ImpulseRC Apex
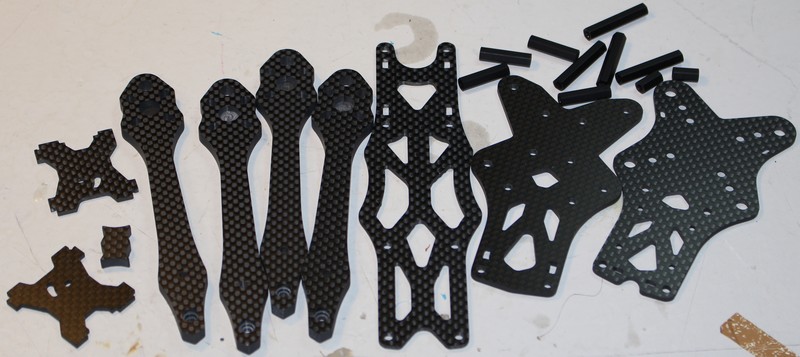
Le kit : Apex
Le kit est disponible en différentes versions (Standard, Mr Steele, ou HD pour le DJI FPV System). Celle-ci , est ‘standard’. La ‘Mr Steele’ est allégée, la HD a des dimensions différentes pour la caméra HD DJI et son électronique.

Carbone de très bonne qualité.
Configuration
La plupart des éléments proviennent de ma Marmotte, démontée et revendue.
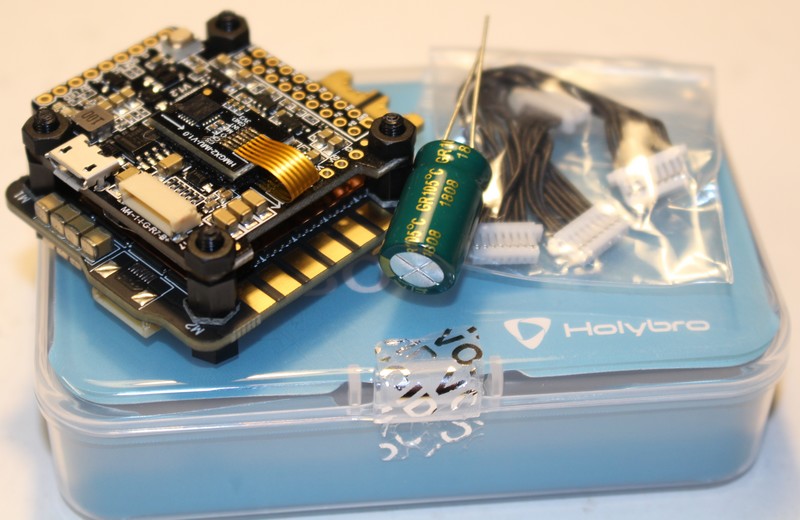
Stack Holybro Kakute F7 + Tekko32 : Stack Kakute F7
VTX Rush Racing.
Il remplace un AKK X2. Le Rush Racing fonctionne très bien, son alimentation pour la caméra est très bien filtrée.
Il est associé à une antenne Foxeer Lolillop 3.
Betaflight n’a plus de configuration par défaut pour le VTX. Il faut soit saisir une table à la main soit charger un fichier correspondant au VTX utilisé.
Fichier VTX Rush Racing

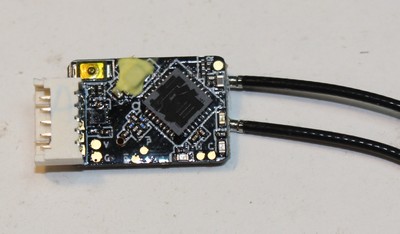
Récepteur FRSky R-XSR.
Moteur Brushless : Amax Amaxino 2207.5 2500KV. .

Camera Foxeer Falkor Mini (1.8mm)

GPS / Compas magnétique Matek M8Q-5883
dans son support en TPU Saintsmart..

CAO 3D :
Support GPS + antenne VTX + antennes récepteur 2.4GHz
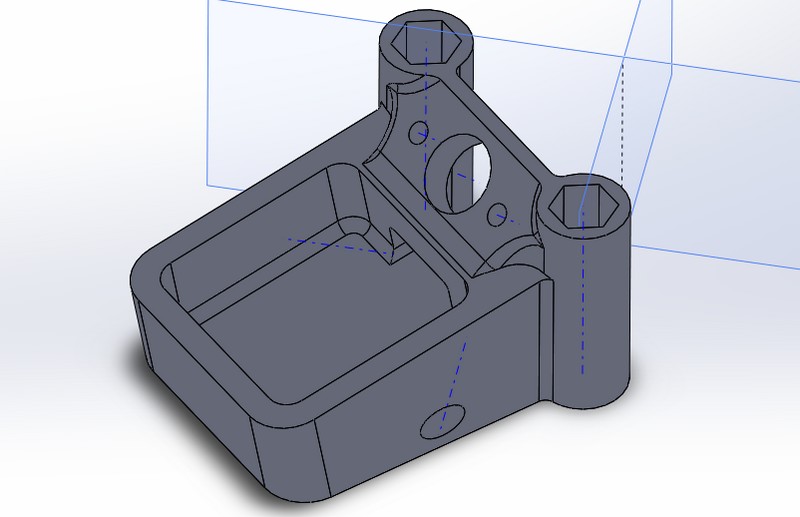
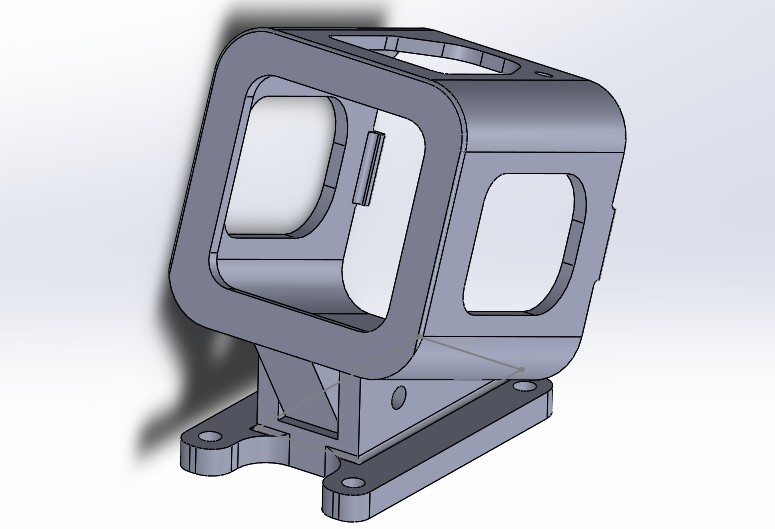
Support pour la caméra Runcam 5 (Doit être compatible avec la GoPro Session 5, qui a les même dimensions)
L’angle est de 20°. Je passerais probablement à 25°.
Il permet d’accueillir un filtre ND (Gris Neutre) de la marque TBS (Team Black Sheep ND filter).
Apex, en images
Montage

Presque complet.

Masse sans LiPo : 420g (LiPo 4S/1550mAh : 170g env.)

Contrôle de vol
![]()
La carte Kakute F7 a été flashée avec Betaflight 4.1.2
L’ESC Tekko32 a été flashée avec la version BLHeli 32 32.7 afin d’avoir le retour des vitesses de rotation de chacun des moteurs pour le RPM Filter.
RPM filter
Le principe est d’asservir le filtrage du bruit vibratoire des moteurs à la vitesse de rotation réelle de ceux-ci.
Pour cela, il faut que l’ESC remonte cette information, c’est pour ça qu’il faut une version récente de BLHeli 32.
Paramètres
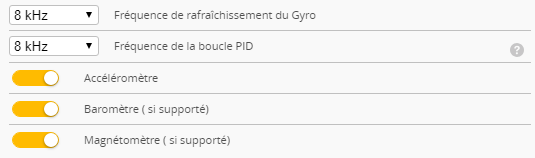
Boucle à 8KHz.
Les capteurs (Accéléro, Baro, Magnéto) sont activés pour le ‘Recue Mode’.
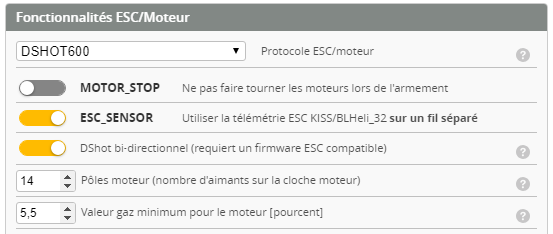
Dshot 600 (Valeur pour boucle à 8KHz et RPM Filter)
Télémétrie et DShot bidirectionnel (aussi pour RPM Filter)
Nombre de pôles moteur (= nombre d’aimants dans la cloche du moteur) pour le calcul de la vitesse réelle du moteur (encore pour RPM Filter)
GPS & Compas
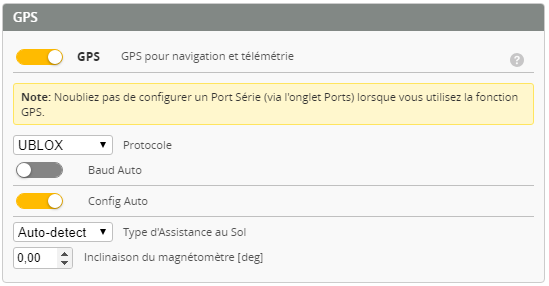
Orientation du compas magnétique : CW 90° Flip, flèche de la carte Matek orientée vers l’arrière (Rescue Mode OK)

Filtrage
Le niveau des filtres est abaissé en ramenant les 2 curseurs à 1.3. Ceci permet de diminer la latence.

Comme RPM Filter est très efficace, il est possible de supprimer un des 2 autres filtres ‘notch’.
A faire dans CLI :
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
save
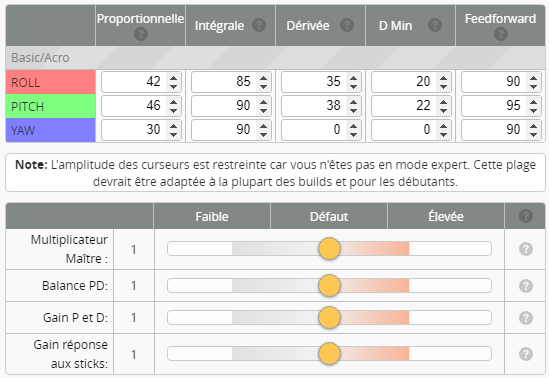
PID
Le réglage de base de Betaflight est vraiment très bien (pour un 5″)
Modification des paramètres GPS & du ‘Rescue Mode’ (dans le CLI)
set gps_ublox_use_galileo = ON (activation de GALILEO)
set gps_rescue_initial_alt = 40 (altitude initiale atteinte automatiquement en Rescue Mode)
set gps_rescue_descent_dist = 150 (distance à partir de laquelle la descente est initiée)
set gps_rescue_min_sats = 5 (Nombre de satellites mini pour le Rescuer Mode)
set gps_rescue_allow_arming_without_fix = ON (Autorise le décollage sans fix GPS, mais dans ce cas pas de Recue Mode possible)
save
Test Rescue Mode
Commande du ‘Rescue Mode’ par un interrupteur.





