
X-Copter, Réglages
Consignes de sécurité
Tous les premiers essais et réglages doivent être effectués sans les hélices.
Programmation de la radiocommande
La radiocommande doit être en mode avion ("ACRO").
Pour commencer, il faut paramètrer les signaux délivrés par le récepteur. Ces signaux habituellement destinés aux servos sont à largeur d'impulsion variable. La largeur d'impulsion varie entre 1000μs (mini.) et 2000μs (maxi.), le neutre étant représenté par 1500μs. Pour un fonctionnement correct avec le logiciel MultiWii, il faut que les signaux varient au minimum de 1100μs à 1900μs. Il est conseiller de dépasser un peu ces valeurs. (1095 / 1905μs). Pour ce faire, il faut agir sur les "courses" des différentes voies en les augmentant jusqu'à 125% par exemple.
On peut controler les min., max. et neutre sur la partie droite du logiciel :

Calibration des controleurs moteurs
Afin que toutes les moteurs réagissent de la même façon, il est souhaitable de calibrer les 4 controleurs (ESC : Electronic Speed Controler).
Pour les HobbyWing : (Effectuer pour chaque ESC)
- Emetteur sous tension, manche gaz au max.
- Connecter la batterie : ESC émet des sons, attendre 2s
- ESC : 2 bip. : Mettre toute suite le manche gaz au minimum
- ESC : émet 1 bip par éléments de batteries. Puis un bip long.
- Débrancher... Suivant...
Vérification du sens des capteurs
Gyromètres
- Roll : basculer à gauche = valeur négative.
- Pitch : basculer en arrière= valeur négative.
- Yaw : rotation vers la gauche = valeur négative.
Accéléromètres
- Idem pour Roll et Pitch
- Z: Gravité
Si le sens est différent, il faut modifier le code du logiciel.
Commandes
Plusieurs commandes sont réalisées avec les manches de la radio.
Armer les moteurs
1) Manche de gaz en bas
2) Maintenir le manche de lacet à droite 1s
La LED verte s'allume de façon permanente.
Désarmer les moteurs
1) Manche de gaz en bas
2) Maintenir le manche de lacet à gauche 1s
La LED verte s'éteint de façon permanente.
Calibrer les gyromètres
1) Placer le Multi-Copter parfaitement à plat
2) Moteurs désarmés
3) Manche de gaz en bas
4) Maintenir le manche de lacet à gauche et le manche de profondeur en bas 1s
La LED verte clignote rapidement puis s'éteint..
Calibrer les accéléromètres
1) Placer le Multi-Copter parfaitement à plat
2) Moteurs désarmés
3) Maintenir le manche de lacet à gauche, gaz à fond et le manche de profondeur en bas 1s
La LED verte clignote rapidement puis s'éteint..
"Trimer" les accéléromètres
1) Calibrer les Acc et Gyro.
2) En mode normal "Trimer" sur la radio.
3) Au sol, passer en mode "AutoLevel", observer la dérive de l'appareil (sur les 2 axes)
4) Moteurs désarmés
5) Manche moteur à fond
6)
Utiliser le manche comme un interrupteur : pousser le manche et revenir au neutre pour faire 1 cran de trim dans le sens souhaité (inverse à la dérive)
Réglage P.I.D.
P comme proportionnel, I comme intégral, D comme Dérivé.
Un régulateur PID est un dispositif de régulation en boucle fermée. On entend par boucle fermée, le fait que l'on utilise une information issue du procédé que l'on veut réguler pour corriger l'erreur. Par exemple, pour une régulation en vitesse d'un moteur, on va entrer dans la régulation la vitesse mesurée du moteur.
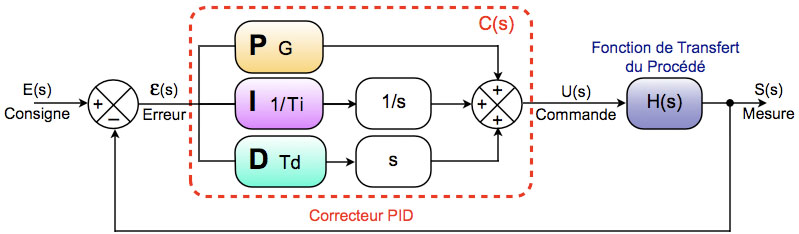
En faisant la différence entre la consigne et la mesure de la sortie du procédé, on en déduit l'Erreur. C'est sur cette valeur Erreur que l'on applique les coefficients P.I.D.
P : Action proportionnelle : Multiplication de l'erreur par un gain.
I : Action intégrale : Permet de tenir compte du passé de la régulation en effectuant au cours du temps l'intégrale de la variation de l'erreur. Son rôle est d'éliminer l'erreur résiduelle.
D : Action dérivée
: Permet de tenir compte des variations brutales de l'erreur.
Voilà pour les généralités ...
Pour notre multicopter, le logiciel gère plusieurs boucles de régulation en utilisant les gyromètres seuls en mode "Acro" ou les gyromètres + les accéléromètres en mode "Stable" ...
A lire :
- Wareck sur le forum France Hélico
- Paramètres de vol configurable sur le site d'Alex